
知能機械研究室の紹介
2014.02.20
「知能機械研究室とはいったいどの様な事をやっているの?」っと思っている人も多いと思います.そこで,我々の研究室でやっている研究を大まかに説明したいと思います.
我々の研究室では主に3つの研究を中心に進めております.それは,4足歩行ロボット,車輪型移動ロボット,運動再現ロボット・スーツの3つになります.各々の機構を図1に示します.
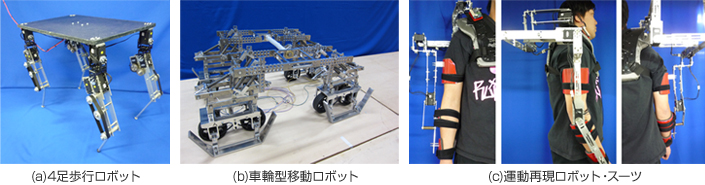 図1 研究している各機構
図1 研究している各機構
では,それぞれどの様な目的があるのでしょうか?
(a) 4足歩行ロボットは,動物の歩行を参考にし,高速での移動を目的としています.
(b) 車輪型移動ロボットは不整地環境を移動するという目的があります.不整地の定義および表現方法は多種多様であり,一般的かつ具体的な表現は存在しませんが,大まかに分類されている中から,凹凸型不整地と呼ばれる起伏や勾配また,高低差のある不整地環境を想定しています.
(c) 運動再現ロボット・スーツは,従来のロボット・スーツとは違い,人間の持つ様々な体の動きを,トレースするという形で記録し,動力を用いて記録した動作を再現することで短期間での学習を可能にするという目的があります.
近年では,製造業ばかりではなく,医療,福祉,災害救助など幅広い分野でロボットの導入が検討されています.上記で示した研究はそういった新しい場での活躍が期待されます.まだ,改善点はたくさんありますが,いずれ人々の役に立てればと思い研究を行っております.今回は簡単な説明ではありましたが,徐々に詳しく説明していけたらなと思います.今後は主にこれらの研究の様子や研究室の雰囲気といったものを掲載していきたいと思います.
機械工学専攻 修士課程1年 小野瀬 雄大





