【量子情報科学研究所】自動運転に応用可能な量子レーダーカメラの設計法を確立
気象条件に依存しない歩行者検知技術
― 3月14日ロンドンで開催されるQuantum Physicsの国際会議の招待講演で発表 ―
自律型やコネクテッド型自動車の自動運転において、車載用センサーは究極的な能力を必要とする。
玉川大学(東京都町田市玉川学園6-1-1 学長:小原芳明)の量子情報科学研究所の研究グループはアメリカのDARPA(米国国防高等研究計画局)で開発された量子計測の原理を自動車用の量子レーダーカメラとして転用する理論を開発した。従来の自動運転用のセンサーであるステレオカメラ、ライダー、ミリ波レーダーなどでは悪天候の状況で障害物の像を捕捉することが困難である。量子レーダーカメラは原理的にレーザー波の伝搬時の環境に依存しないことが特徴であり、その特徴を自動運転環境で実現する設計法が確立された。この結果に関する本学の成果は平成28年3月14日(月)、ロンドンで開催されるQuantum Physicsの国際会議の招待講演で発表する。
【掲載論文名】
Osamu Hirota、”Importance and applications of infinite dimensional non-orthogonal quantum state”,
Invited paper in International Conference on Quantum Physics
http://quantumphysics.conferenceseries.com/
【今回の成果】
自動運転において、自動車の周辺の障害物を捕捉することは必要不可欠である。現在、歩行者などを捕捉するには高感度のカメラやレーザーレーダーなどを用いるため、超高感度ステレオカメラやイメージング・ライダー等が開発されつつある。これらの自動運転用のセンサーは、原則、ターゲットに照射する光の反射波が運んでくる1次情報を分析することによって障害物を画像化する。このような原理のセンサーは反射波に対する擾乱によって性能が急激に劣化する。アメリカのDARPAで開発された新しい量子計測原理(Quantum Methodology/Sensor)によって反射波の2次情報を利用して画像化が可能となった。この特徴を現実的な擾乱の環境下での自動運転において実現する方法を研究した結果、約100メートル程度のセンサー領域をカバーするシステムが実現可能であることが理論的に確認され、日欧の自動車部品メーカーなどに事前情報を提供している。車内の光ネットワーク化と連携してさらに高性能化が期待される。 平成28年3月14日(月)からロンドンで開催されるInternational Conference on Quantum Physicsにおいて第1報が発表される。
資料
【背景】
インテリジェント・ドライブに代表される半自動運転技術はすでに実用化され、次世代の自動運転の実現に向け、急ピッチで研究開発が進められている。これらの技術の要となるセンサーは、これまでの能力をはるかに超える究極的な性能を持つことが必要不可欠である。現在、ミリ波レーダー、高感度CCDカメラ、赤外線照射カメラ、ライダーなどの既存の技術をさらに高めることによって、その目的を達成しようとしている。ミリ波レーダーは悪天候下でも、ターゲットの存在を検知する能力を有するが、ターゲットの形状を認識することが難しい。超高感度CCDで構成されるステレオカメラは明確なターゲットの形状を認識することができるが、悪天候下では能力が急激に劣化する。ライダーはレーザービームをスキャンして反射波の点群データを得て、自動車の周辺の3D地図を作成できるため、自車の位置を正確に捕捉するシステムに応用される。さらに多数のレーザーを用いて、自車周辺のイメージングが可能である。しかし、悪天候下ではカメラと同様に性能が劣化する。このように既存の原理によるセンサー技術の延長線上での開発は、一般の自動運転を目的とするシステムとしては、十分な安全性を確保することが難しく、新原理による全天候型のカメラ技術の開発が急務である。
【自動運転用・量子レーダーカメラの概念と特徴】
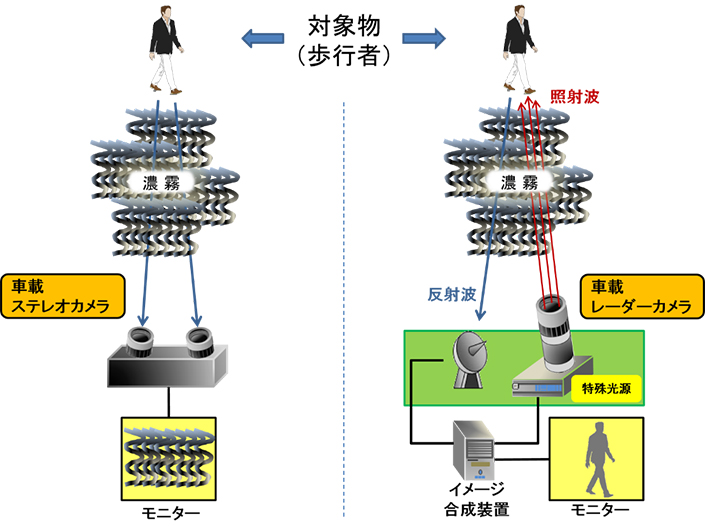 図の説明:既存技術(左)と新技術(右)のターゲットの識別能力の比較:
図の説明:既存技術(左)と新技術(右)のターゲットの識別能力の比較:既存技術(左)では、濃霧などの環境の悪化の際にターゲットの形状を捕捉するのが困難であるが、新技術(右)では可能となり、自動運転時に悪天候になっても安全性の確保を格段に向上させることが可能となる。広範な応用が可能になるため、このシステムの実現に向け、量子光源やシステムを開発するベンチャー企業の設立を計画中である。
シェアする
