運動学習の統一理論の提唱-運動学習における「誤差の予測」の重要性を発見-
玉川大学 脳科学研究所 (町田市玉川学園6-1-1 所長: 木村實)の瀧山 健研究員、独立行政法人 情報通信研究機構 脳情報通信融合研究センターの平島 雅也 研究員、東京大学 大学院教育学研究科の野崎 大地 教授による研究チームは、運動学習の多種多様な特徴を統一的に理解するための運動学習の統一理論を提唱しました。脳は運動を実行する前の運動準備段階においてこれから実行する運動の成否を暗黙の内に予測していること、すなわち「誤差の予測」を運動学習の枠組みに組み込んだ新たな運動学習モデルを提案しました。この新しいモデルによって、従来は全く異なる解釈がなされてきた運動学習の様々な特徴を統一的に理解できること、そして提案モデルでないと予見できない新たな現象が存在することを発見しました。本研究成果は米国オンライン雑誌 ”Nature Communications” に2015年1月30日(米国東部標準時)に掲載されます。
掲載論文名
Prospective errors determine motor learning
(誤差の予測が運動学習を決定する)
研究概要
経験したことのないスポーツ・楽器を始めてすぐには思い描いた通りの運動・演奏ができないものの、経験を積むにつれて高度な運動・演奏が可能になっていく過程は多くの人が経験したことがあるでしょう。思い描いた通りの運動と実行した運動との運動誤差は運動学習の過程で徐々に減少していきます。スポーツや楽器演奏の技能習得に加え、リハビリテーション、赤ちゃんの発達過程、ロボティクスもまた運動学習研究の対象であり、今では生理学、心理学、認知科学、工学、など様々な分野の研究者が運動学習研究に参画するようになっています。近年の脳神経科学・心理学研究手法の洗練化により、運動学習に関する多様な現象が報告されるとともに、各現象を個別に解釈するための理論が提唱されてきました。しかしながら、多種多様な運動学習の特徴が報告される度に様々な理論が場当たり的に提唱され、詰まるところ運動学習における重要な要素は何か、という問いに対する答えは、却って混迷を深めてしまっているのが現状です。
今回、玉川大学 瀧山 健 研究員、情報通信研究機構 平島 雅也 研究員、東京大学 野崎 大地 教授による研究チームは、脳は運動を実行する前の運動準備段階においてこれから実行する運動の成否を暗黙の内に予測していること、すなわち「誤差の予測」を取り入れた新たな運動学習の数理モデルを提唱しました。従来、運動誤差は運動を修正するためのみに重要であると考えられてきました。つまり、ボールを蹴った際に思い描いたボールの軌道よりも右にボールが逸れてしまったならば、次は少し左にボールが跳ぶように運動を修正する、という考え方です。しかしながら、サッカーのペナルティーキックのような緊迫した場面においては、運動を実行する前に「このペナルティーキックは成功するだろうか、ボールが右にずれはしないだろうか」というようにこれから実行する運動の結果の予測が頭に雑念として浮かんできてしまうものです。当研究チームは誤差の予測が暗黙の内に運動準備段階に影響を与えることが、既存の数理モデルでは再現できなかった運動学習の特徴を数理モデル上で再現するための必要条件であることを数学的に導き、数学的根拠に基づき誤差の予測を取り入れた運動学習の数理モデルを提案するに至りました。
しかしながら、誤差の予測を運動学習の数理モデルに導入することは世界で初めての試みであり、数学的根拠に基づいているとはいえその妥当性は確かなものではありません。そこで同研究チームは、誤差の予測を取り入れた運動学習の数理モデルのみが予想できる現象が本当に実験的に確認できるか否かを検証しました。その予想とは、どんなに達成困難な運動であっても、少なくとも2回続けて練習すれば高い学習効果が得られるというものです。同研究チームはマニピュランダムと呼ばれる機械を用いて行動実験を行い、予想された新たな運動学習の現象が実際に確認できることを示しました。すなわち、数学的根拠に加え行動実験の結果に基づき、誤差の予測を運動学習の数理モデルに導入することの妥当性を示しました。
更に、同研究チームは数理モデルの数値シミュレーションを試み、長年に渡り蓄積されてきた多種多様な運動学習に関する研究成果をどこまで再現することができるかを検証しました。その結果、既存の運動学習理論が再現可能である研究成果は全て提案モデルにより再現可能であることを発見しました。すなわち、運動学習の多種多様な特徴は「誤差の予測」の要因を運動学習に導入することで統一的に理解することができることを発見しました。
結果の意義・今後の展望
当研究チームは運動学習研究に「誤差の予測」という新たなアイデアを取り入れ、数学的手法、行動実験、数値シミュレーションを組み合わせ、運動学習の多種多様な特徴を統一的に理解する運動学習の統一理論を提唱しました。現在までに多くの運動学習理論が提唱されてきていますが、その多くが運動学習の個々の特徴を別個に理解するための理論に留まっていました。そのため、運動学習における重要な要因は何か、という問いに明確な答えを出すことができませんでした。運動学習の多種多様な特徴を統一的に理解する運動学習の統一理論の提唱は、運動学習の脳内メカニズムを解明する大きな手がかりとなることが期待できます。
加えて、当研究チームはどんなに達成困難な運動であっても、少なくとも2回以上その運動を続けて実行することで高いトレーニング効果が得られることを示しています。この運動学習の特徴は当研究チームにより初めて発見されたものであり、効果的なトレーニング方法・リハビリテーション方法の提案に繋がることが期待されます。
研究手法
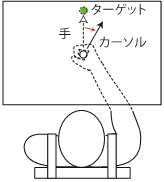 図1a
図1a行動実験:実験協力者にはマニピュランダムと呼ばれる機械を右手で握り、マニピュランダムの位置に対応して画面に表示されているカーソルを操る課題を行ってもらいました(図1a)。本課題では、カーソルを画面上のターゲットに向かって適度な速度で真っ直ぐ動かしてもらいます。ターゲットに到達できたときには爆発音が鳴ります。初めに学習試行を210試行経験してもらい、次いで10試行の脱学習試行を、最後に50試行のテスト試行を経験してもらいました(図1b)。テスト試行では突然、カーソルが思った以上に右方向にずれてしまう新奇な環境へと変化します(図1a, 半数の実験協力者には右にずれてしまう環境を、半数の実験協力者には左にずれてしまう環境を経験してもらいました)。突然の変化が生じた直後には、カーソルをターゲットに真っ直ぐ動かすことができなくなってしまうものの、練習を重ねるうちに自ずと再び課題を達成することができるように学習することができます。
後述する学習試行を用い、これから実行する運動の誤差が予測しやすいか否かがどのようにテスト試行の振る舞いに影響を及ぼすのかを検証しました。既存の運動学習のモデルの予想は、誤差が予測しやすいか否かは全くテスト試行の振る舞いに影響しないというものですが、研究チームが提案した「誤差の予測」モデルの予想は、誤差が予測しやすい学習試行を経験した実験協力者ほど、テスト試行において素早く課題を達成することができるようになるというものです。
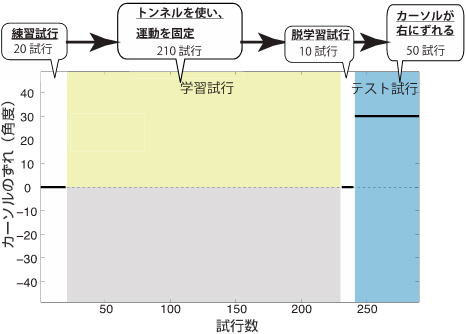 図1b
図1b学習試行においてはターゲットの位置は毎試行同じ位置に提示されます(図1c)。さらに仮想的なトンネルを作成し、実験協力者はターゲットに向かって真っ直ぐにしか腕が伸ばせないようになっています。しかしながら、カーソルはマニピュランダムの動きとは無関係にランダムにターゲットに向かって動いていきます。このカーソルの動きは7パターンあり、1/7の確率でカーソルは真っ直ぐターゲットに向かっていき運動は成功しますが、3/7の確率でカーソルはターゲットよりも右にずれて運動は失敗し、3/7の確率でカーソルはターゲットよりも左にずれて運動が失敗するように設定されています。成否の確率は全ての実験協力者間で統一されているものの、各実験協力者は3種類の実験設定の内いずれかを経験します(図1c)。カーソルの動きが毎試行全く予想できず誤差が予測できない学習試行を経験する実験協力者たちをグループ1と名付けます。
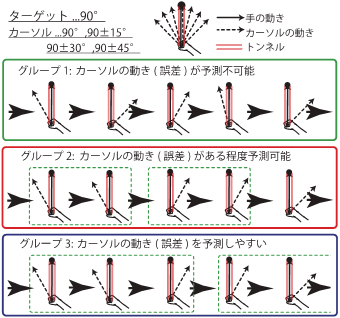 図1c
図1c少なくとも2試行は必ず同じカーソルの動きを経験し誤差をある程度予測できる実験協力者たちをグループ2、少なくとも3試行は必ず同じカーソルの動きを経験し誤差を予測しやすい実験協力者たちをグループ3と名付けます。重要な点は、実験協力者が実行する運動はトンネルにより固定され、ターゲットの位置(目標の運動)も固定され、さらに運動の成功確率も1/7で固定されている一方、これから実行する運動で生じる誤差を予測しやすいか否かのみがグループ1、2、3の間で異なるという点です。
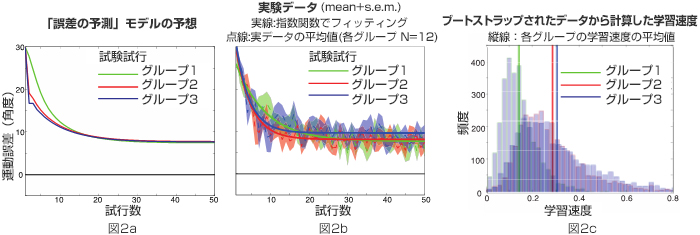
試験試行における各グループの平均的な振る舞いを調べてみると、研究チームの「誤差の予測」モデルのみが予想したように(図2a)、グループ3が最も素早く課題を達成できることが判明し、次いでグループ2が、そしてグループ1が最も課題を達成するために試行数が必要だったことがわかりました(図2b)。学習を達成する早さに関して各グループ間で統計的に有意な差が確認できたものの、グループ3とグループ2との違いよりも遥かに大きな違いがグループ2とグループ1の間に確認でき(図2c)、それもまた「誤差の予測」モデルの予測通りの結果でした。
数理モデル:運動指令を出力する神経回路網モデルを構築しました。特に、「誤差の予測」が運動の準備段階における各素子の活動を決定する神経回路網モデルを構築しました。具体的には以下の1-4の手順を繰り返し数値シミュレーションを行いました(図3)。1 (運動準備段階): これから実行する運動における「誤差の予測」が神経回路網モデルの各素子の活動を決定する。2 (運動実行): 運動を実行し、それに伴い運動誤差を観測する。3 (運動の修正): 運動誤差を小さくするように運動指令を修正する。4 (誤差の予測): 現状での「誤差の予測」と観測した運動誤差とを組み合わせ、次に実行する運動における誤差を予測する。
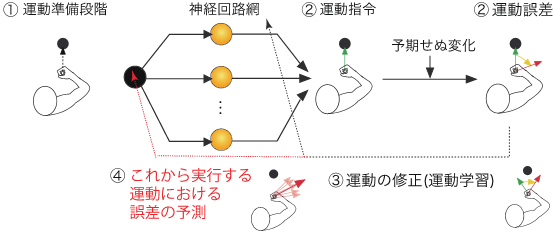 図3
図3「誤差の予測」モデルの特徴は、課題に応じて適切にかつ自動的に運動指令を切り替えることができ、尚かつ運動記憶を適切に保持することができる点です。テスト実験のようにカーソルが右にずれて右方向への誤差が生じたときには左方向へ運動を修正する必要があり、一方カーソルが左にずれて左方向への誤差が生じたときには右方向へ運動を修正する必要があります。「誤差の予測」モデルにおいては、右方向への誤差が予測できたときに活動する素子には左方向へ運動を修正するように学習が進んでいき、左方向への誤差が予測できたときに活動する素子には右方向へ運動を修正するように学習が進んでいきます。すなわち、誤差が予測できる環境下のみにおいては、実行している運動、目標の運動、運動の成功確率に関わらず課題に適した運動を学習することが可能となります。このように、「誤差の予測」に応じて運動を学習しかつ運動記憶を切り替えることにより、「誤差の予測」モデルは運動学習の多種多様な特徴を統一的に理解できることを示しました。
取材・研究内容に関するお問い合わせ先
学校法人玉川学園 教育企画部 キャンパス インフォメーション センター
〒194‐8610 東京都町田市玉川学園6-1-1
TEL:042-739-8710
FAX:042-739-8723
E-mail:pr@tamagawa.ac.jp
シェアする